IoT (Internet of Things)
Références



L'actualité
-
Le robot Pepper, nid à vulnérabilités de sécurité

Des chercheurs danois et suédois en sciences informatiques et systèmes autonomes ont décortiqué la sécurité...
-
Nvidia réunit IA et HPC dans sa HGX-2...
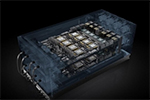
Nvidia se prépare à livrer la plate-forme serveur HGX-2 qui sera capable d'exploiter la puissance de 16 GPU Tesla V100...
-
L'Ecole du numérique forme des managers...

L'EMD, une école de commerce située � Marseille ouvre à la prochaine rentrée l'école du numérique...
Parcours & Expérience

Librairie

L'information



IoT (Internet of Things)
L'IdO consiste à étendre la connectivité Internet au-delà des appareils standards, tels que les ordinateurs de bureau, ordinateurs portables, smartphones et tablettes, à une gamme de traditionnellement muets appareils ou physiques non Internet compatibles et les objets de tous les jours. Intégrés à la technologie, ces appareils peuvent communiquer et interagir sur Internet, et peuvent être surveillés et contrôlés à distance.
Arduino
Arduino, et son synonyme Genuino, est une marque qui couvre des cartes matériellement
libres sur lesquelles se trouve un microcontrôleur (d'architecture Atmel AVR comme l'Atmega328p,
et d'architecture ARM comme le Cortex-M3 pour l'Arduino Due).Le microcontrôleur peut être programmé pour analyser et produire des signaux électriques, de manière à effectuer des tâches très diverses comme la domotique (le contrôle des appareils domestiques - éclairage, chauffage...), le pilotage d'un robot, de l'informatique embarquée, etc... |

|
C'est une plate-forme basée sur une interface entrée / sortie simple. Il était destiné à l'origine principalement mais pas exclusivement à la programmation multimédia interactive en vue de spectacles ou d'animations artistiques, ce qui explique en partie la descendance de son environnement de développement de Processing, lui-même inspiré de l'environnement de programmation
Wiring.Arduino peut être utilisé pour construire des objets interactifs
indépendants (prototypage rapide), ou bien peut être connecté à
un ordinateur pour communiquer avec ses logiciels (ex. : Macromedia Flash, Processing,
Max/MSP, Usine Hollyhock, Pure Data, SuperCollider).
En 2011, les versions vendues sont pré-assemblées.
Des informations sont fournies pour ceux qui souhaitent assembler ou construire une carte Arduino eux-mêmes.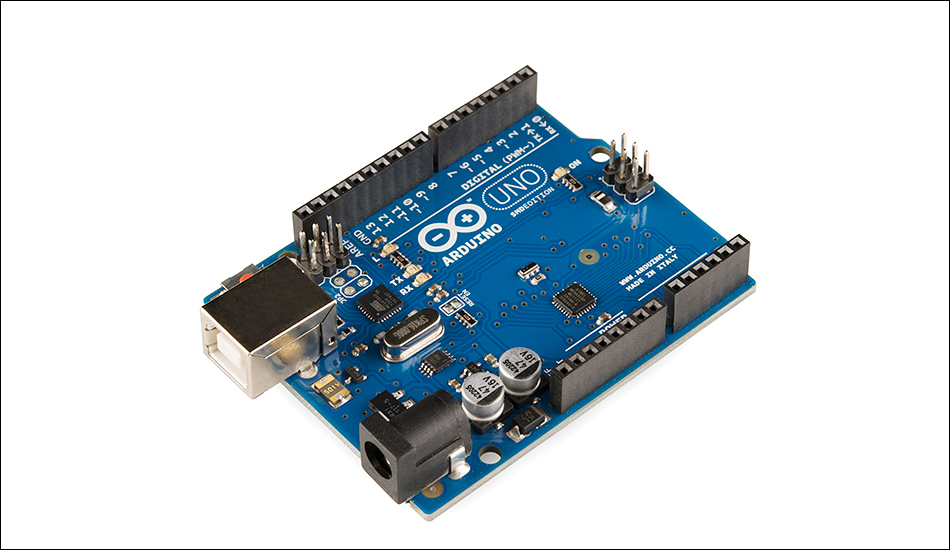
Maestro
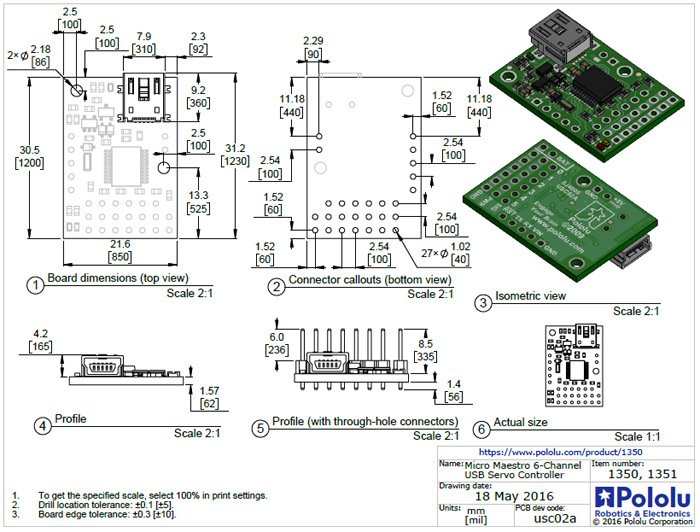
Les Maestros constituent la famille de contrôleurs USB de deuxième génération de Pololu.
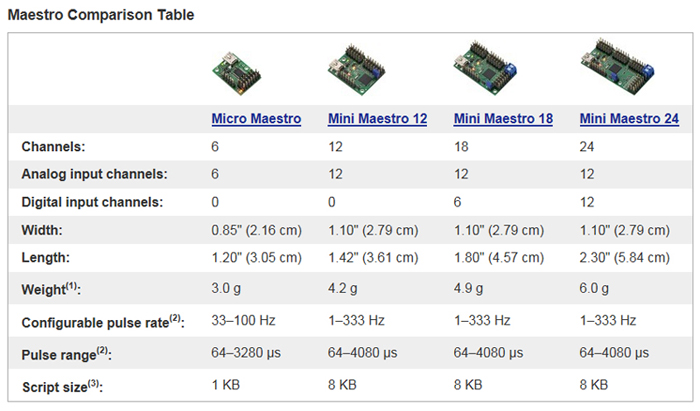
La famille Maestro se compose de quatre contrôleurs, chacun disponible entièrement assemblé ou en kit :Micro Maestro 6, Mini Maestro 12, Mini Maestro 18, Mini Maestro 24 |

|
Avec trois méthodes de contrôle:
USB pour une connexion directe à un ordinateur PC, série TTL pour une utilisation avec
des systèmes intégrés et script interne pour des applications autonomes sans contrôleur hôte et des canaux pouvant être
configurés en tant que sorties d'asservissement pour une utilisation avec une radiocommande (RC) des servos ou des
contrôleurs de vitesse électroniques (ESC), des sorties numériques ou des entrées analogiques / numériques,
le Maestro est un contrôleur asservi très polyvalent et une carte d'E/S générale dans un boîtier extrêmement compact.Les servo-impulsions extrêmement précises et haute résolution ont une gigue de moins de 200ns, ce qui rend le
Maestro
bien adapté à l'animation haute performance. Le contrôle intégré de la vitesse et de l'accélération facilite la réalisation
de mouvements fluides et homogènes sans nécessiter de contrôle source pour calculer et diffuser en continu les mises à jour
des positions intermédiaires dans Maestro. Le Maestro dispose de fréquences d'impulsions configurables
(jusqu'à 333 Hz pour les Mini Maestros) et peut générer une large plage d'impulsions pour permettre une réactivité maximale,
allant des servos modernes. Les unités peuvent être chaînées en série avec des contrôleurs de servo et moteur Pololu
supplémentaires sur une seule ligne série.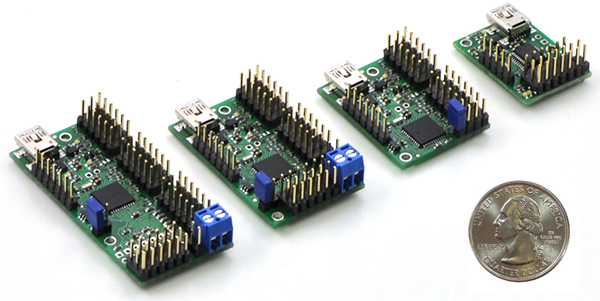
IoT (Internet of Things) > Servomoteur
|
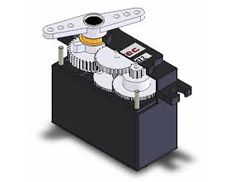
Un servomoteur (souvent abrégé en "servo", est un moteur capable de maintenir
une opposition à un effort statique et dont la position est vérifiée
en continu et corrigée en fonction de la mesure. C'est un ensemble mécanique et électronique comprenant :
|
|
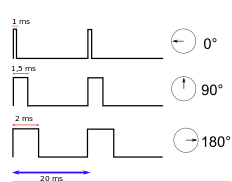
Les servomoteurs sont commandés par l'intermédiaire d'un câble électrique à trois fils qui permet d'alimenter le moteur et de lui transmettre des consignes de position sous forme d'un signal codé en largeur d'impulsion plus communément appelé
PWM.Cela signifie que c'est la durée des impulsions qui détermine l'angle absolu de l'axe de sortie et donc la position du bras de commande du servomoteur. Le signal est répété périodiquement, en général toutes les 20 millisecondes, ce qui permet à l'électronique de contrôler et de corriger continuellement la position angulaire de l'axe de sortie, cette dernière étant mesurée par le potentiomètre.